2.2 The simple Joy valve gear
11.01.2013
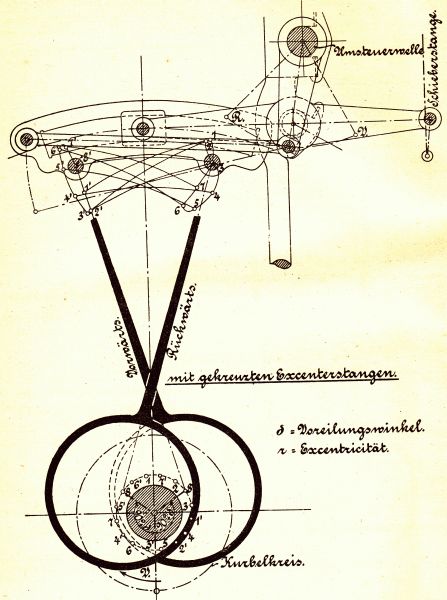
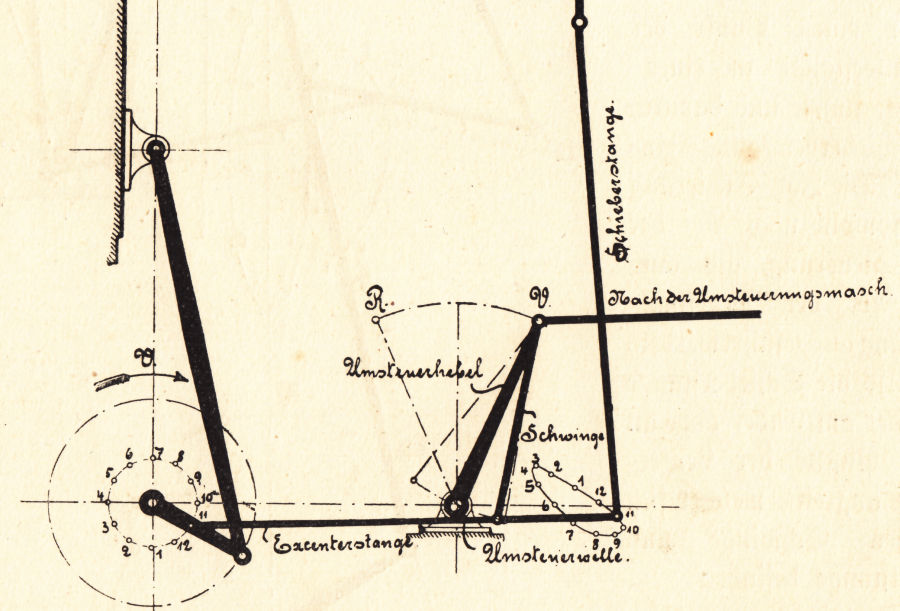
Die ersten von der Deutschen Kaiserlichen Marine eingesetzten Dampfbootmaschinen waren mit einer Stephensonsteuerung ausgestattet. Diese besteht konstruktionsbedingt aus vielen Einzelteilen sowie vielen Lagerstellen. Prinzip einer Stephensonsteuerung siehe Bild links. In Marinekreisen galten die aus England bezogenen Dampfmaschinen als störanfällig und wartungsintensiv. Möglicherweise aus diesen Gründen wurde die hier behandelte nächste Maschinengeneration mit der fertigungstechnisch wesentlich einfacheren Joy-Steuerung ausgerüstet (Bild rechts).
Bei der Joy-Steuerung entfallen generell je Zylinder die zwei großen Exzenter der Stephensonsteuerung. Die Bewegung der Dampfschieber wird stattdessen direkt vom Hauptpleuel abgenommen. Bei der Kaiserlichen Marine verzichtete man weiterhin auf die zwei sonst üblichen hier rot markierten Ellipsenlenker und das Festlager (rechts im Bild). Der Bewegungsabgriff erfolgt somit direkt über die grün eingezeichnete Stange.
Pro Zylinder benötigt eine Stephensonsteuerung immer mindestens 7 Drehlager - davon 2 komplizierte Exzenter. Die vereinfachte Joy-Steuerung kommt hingegen mit 4 kleinen Drehlagern aus! Weiterhin ist die Steuerkulisse bei der Joy Steueruerung gerade ausgeführt. So kann sie leicht gefertigt und bei Verschleiß nachgestellt werden.
Den Vorteil der Einfachheit erkauft man sich durch eine schlechtere Dampfverteilung. Beide Zylinderseiten erhalten unterschiedliche Dampfmengen. Dies führt zu einem etwas ungleichmäßigen Lauf. Auch ist man in der Variation der Füllung und der Auslegung des Rückwärtsgangs etwas eingeschränkt. Dies alles sind Faktoren, die sich auf den Komfort und die Wirtschaftlichkeit auswirken. Zivile und militärische Dampfboote sollten aber in erster Linie einfach zu bedienen, leicht zu warten und zuverlässig im Betrieb sein, was für die vereinfachte Umsteuerung von Joy spricht.
Nachtrag am 19.01.2013
Einige Freunde wiesen mich die letzten Tage auf die Joy-Umsteuerung ohne Ellipsenlenker und ohne Schieberkulisse hin (siehe Abbildung unten). Durch den Entfall der Schieberkulisse ist diese Konstruktion in der Tat noch einfacher und robuster, als bei der Beibootmaschine der Kaiserlichen Maschine von 1902. Warum dies damals so konstruiert wurde, vermag ich nicht zu sagen. Aus England sind kleinere Dampfbootmaschinen mit der unten gezeigten Joy Variante bekannt und auch heute noch in Betrieb.
PS:
Lieber Walter, vielen Dank für die freundliche Überlassung des "Ammann`s Schiffs-Maschinisten"! Bisher hatte ich mir daraus immer nur ein paar Kopien in der Bibliothek gemacht - jetzt steht Dein Exemplar hinter mir im Schrank.